

ABB機器人自動測量程序-Tool center point and payload
作為機器人四大家族之一的ABB機器人以其領先的技術和良好的質量聞名于世,在ABB機器人中提供了大量的可選項功能以及例行程序幫助工程師減少工作量,提升工作效率,其中就有今天要介紹的ABB機器人自帶測量Tool Center Point(工具中心點)和Payload(負載)的例行程序。如何使用ABB機器人自動測量程序-Tool center point and payload提高我們工作效率呢?
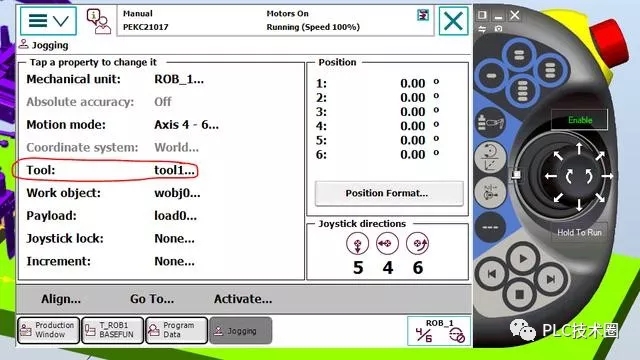
首先在將機器人抓手裝在機器人第六軸上,先點擊進行手動操作界面即Jogging中,在Tool一欄中選擇要測量的工具坐標系Tool1,注意此步很重要,如果沒有正確選擇要測量的Tool之后的操作步驟會出現錯誤。再點擊進入程序界面,在Debug中我們可以看到Call routine選項,沒錯,就是這個選項。
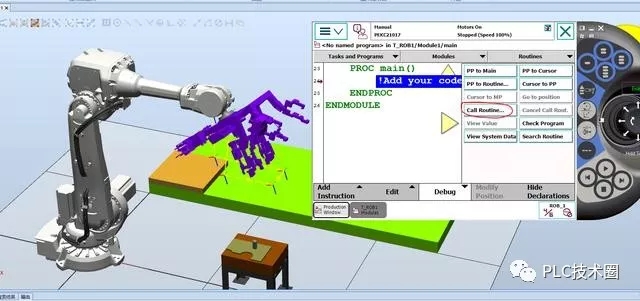
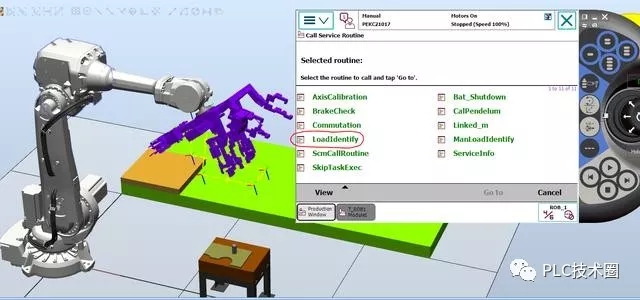
點擊Call routine,示教器界面會顯示多個ABB機器人自帶的例行程序,今天我們要選擇的是LoadIdentify。
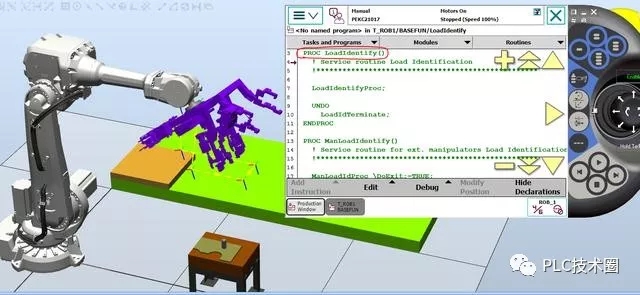
點擊選擇LoadIdentify選項,出現LoadIdentify程序界面。
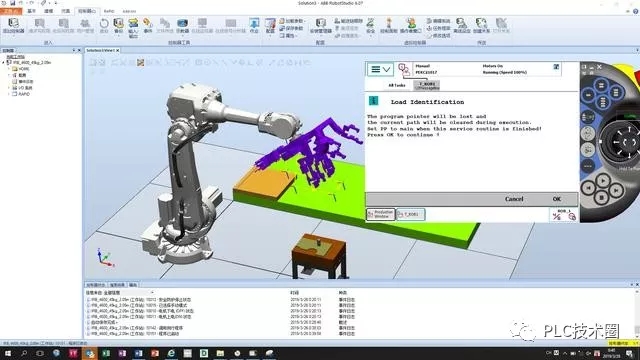
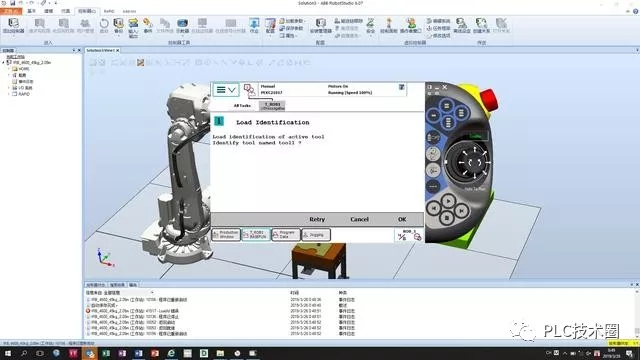
出現這個界面之后直接點擊示教器連續運行按鈕運行該程序,出現新畫面,點擊OK,按照提示一步一步執行。
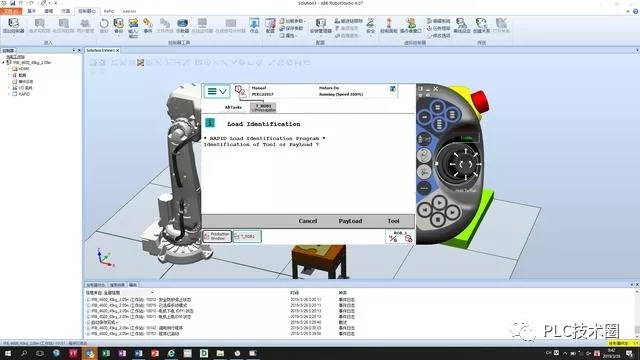
點擊之后會出現另外一個畫面,讓我們選擇是進行TCP設定還是Payload的設定。如果我們要進行TCP設定則選擇Tool,進行Payload設定則選擇Payload,在這里我們以Tool為例進行講解。
點擊Tool出現如下畫面,告訴我們要正確安裝抓手到機器人第六軸上,直接選擇OK,繼續向下執行程序。出現新的畫面,詢問是否對Tool1進行設定,選擇OK繼續執行。
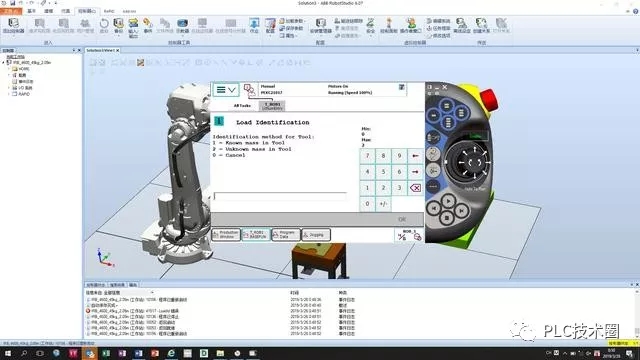
點擊之后出現新的畫面,詢問Tool1的中應該設定第六軸抓手的重量,假定不知道抓手重量,填寫2。
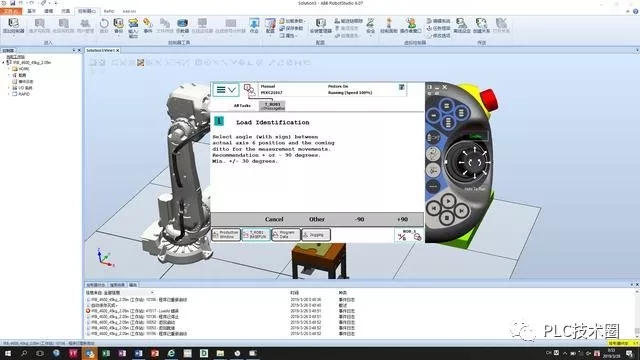
之后出現新的畫面,詢問測量角度。因為機器人測量過程中要不斷的變化角度來正確計算Tool1中的重量、重心等參數,在這里我們選擇系統的建議值+90。
之后出現新的畫面,讓我們操作機器人將第四軸和第五軸移動至零點。按照要求將第四和第五軸移動至零點即可。
之后會出現新的畫面,系統提示將執行緩慢執行程序,點擊Move。
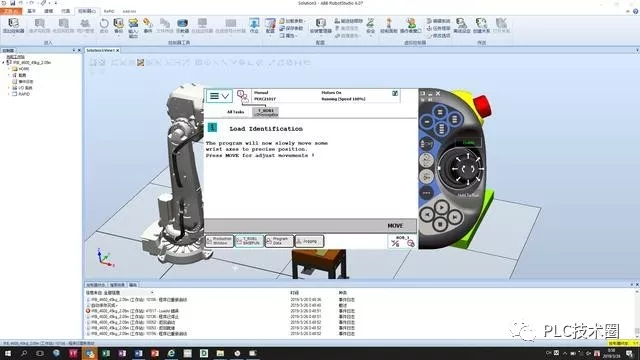
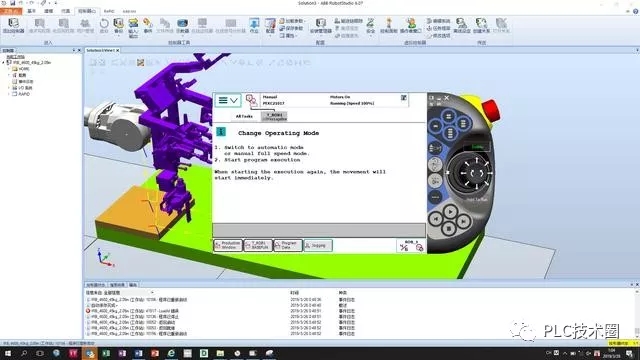
之后就是機器人自動緩慢移動的過程了,此處不再贅述。機器人緩慢移動完成之后會出現新的提示畫面,提示我們將機器人切換成自動模式或者手動全速模式,按照系統要求進行操作即可。
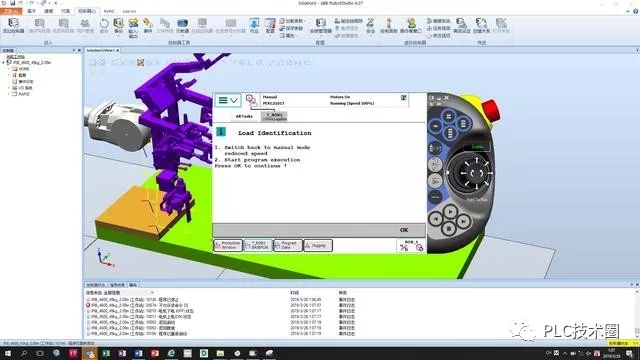
切換成自動模式后在程序界面再次點擊連續運行按鈕,剩下的交給ABB來干吧。運行程序結束之后系統自動提示切換成手動模式。切換成手動模式點擊OK,之后在示教器界面即可顯示Tool1中的重量重心等參數。因為使用的是ABB的仿真軟件,機器人第六軸抓手并沒有實際的重量,所以用仿真軟件并不會出現Tool1的測量值。
以上就是100唯爾(100vr.com)小編為您介紹的關于ABB的知識技巧了,學習以上的ABB機器人自動測量程序-Tool center point and payload知識,對于ABB的幫助都是非常大的,這也是新手學習機器人所需要注意的地方。如果使用100唯爾還有什么問題可以點擊右側人工服務,我們會有專業的人士來為您解答。
本站在轉載文章時均注明來源出處,轉載目的在于傳遞更多信息,未用于商業用途。如因本站的文章、圖片等在內容、版權或其它方面存在問題或異議,請與本站聯系(電話:0592-5551325,郵箱:help@onesoft.com.cn),本站將作妥善處理。
 向客服提問
向客服提問ABB課程推薦















機器人熱門資料


機器人技術文檔


推薦閱讀